Je retourne sur Unity après de longs mois d'arrêts et je suis un peu rouillé..
Je suis confronté à un problème que je pense tout simple mais impossible de m'en sortir:
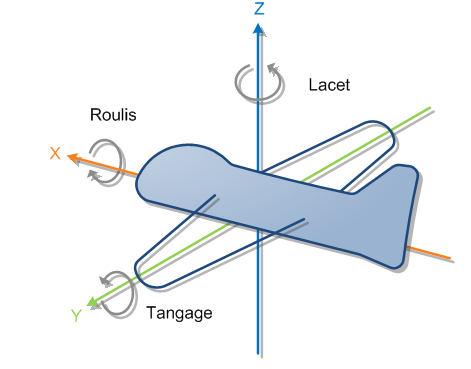
J'ai un modèle 3D de bateau basique, immobile en translation, je reçoit les données d'orientation d'un capteur inertiel (roulis, tangage, lacet), et aimerais les appliquer à mon bateau.
Je cherche donc à synchroniser l'orientation de mon bateau avec celle de mon capteur inertiel.
mais quoi que je fasse (les données en provenance du capteur sont correctes) la rotation n'est pas bonne, elle semble suivre les axes du repère absolu et non local, malgré qu'un GameObject vide soit parent de mon bateau, et varie parfois brusquement..
J'utilise le code suivant:
Code : Tout sélectionner
bateau.transform.localEulerAngles = new Vector3(roulis, tangage, lacet);