Bonjour à tous, alors voilà je vais essayer d'être concis mais j'ai un peu de mal à rendre ça clair. Je bosse sur un sujet pour les cours et je dois intégrer un bras robotique en VR dont les mouvements sont assez particuliers (Kuka iiwa LBR 14, pour que vous ayez une meilleure idée). Mon problème est que j'ai d'abord essayé de mettre des configurable joints, les mouvements me convenaient alors sauf que j'aimerais que lorsque le bras n'est pas saisi, celui-ci s'arrête or il dérive et fini dans une position indésirée. Je suis alors allé voir du côté de IK Animation, mais là les mouvements ne me plaisaient pas du tout.
Je me dis que peut-être un script aiderait à contraindre un arrêt forcé si l'objet n'est pas saisi mais je ne m'y connais pas assez en C#, ou alors que Chain IK n'est peut-être pas le plus adapté. En espérant que vous puissiez m'éclairer.
[Résolu] Animation Bras Robotique
 [Résolu] Animation Bras Robotique
[Résolu] Animation Bras Robotique
Dernière édition par Vevitek le 09 Avr 2021 19:48, édité 1 fois.
-
boubouk50

- ModoGenereux

- Messages : 6246
- Inscription : 28 Avr 2014 11:57
- Localisation : Saint-Didier-en-Bresse (71)
Re: Animation Bras Robotique
Salut,
il ne faut pas être concis, mais clair, et tu as oublié l'essentiel: Quel résultat dois-tu atteindre?
On ne peut pas résoudre ton problème simplement en le connaissant, il nous manque le contexte, c'est à dire comment doit se piloter ce bras articulé.
Un IK permet de contrôler toute la chaine de Rig par son extrémité. En gros, tu ne pilotes que le bout de ton bras, et le reste se débrouille pour se positionner correctement.
Les Joints sont des liens physiques entre chaque élément du rig permettant une réponse physiquement juste lors de toute transformation survenue à un des éléments. De ce que tu dis, lorsque ton bras n'est pas saisi, il faut arrêter les calculs, donc surement annuler toute vélocité angulaire.
il ne faut pas être concis, mais clair, et tu as oublié l'essentiel: Quel résultat dois-tu atteindre?
On ne peut pas résoudre ton problème simplement en le connaissant, il nous manque le contexte, c'est à dire comment doit se piloter ce bras articulé.
Un IK permet de contrôler toute la chaine de Rig par son extrémité. En gros, tu ne pilotes que le bout de ton bras, et le reste se débrouille pour se positionner correctement.
Les Joints sont des liens physiques entre chaque élément du rig permettant une réponse physiquement juste lors de toute transformation survenue à un des éléments. De ce que tu dis, lorsque ton bras n'est pas saisi, il faut arrêter les calculs, donc surement annuler toute vélocité angulaire.
"Ce n'est pas en améliorant la bougie, que l'on a inventé l'ampoule, c'est en marchant longtemps."
Nétiquette du forum
Savoir faire une recherche
Apprendre la programmation
Nétiquette du forum
Savoir faire une recherche
Apprendre la programmation
Re: Animation Bras Robotique
Excusez-moi, alors dans les grandes lignes mon projet consiste à simuler une salle d'opération en VR, il faut donc pouvoir saisir les objets (avec les manettes HTC Vive) de sorte à représenter l'encombrement relatif aux machines dans une salle d'opération. Il faudrait donc pouvoir le laisser dans n'importe quelle configuration. Ci-joint une vidéo du bras en question.
https://www.youtube.com/watch?v=myuJpwBr45M
Je me dis que mon armature n'est sans doute pas adaptée, j'ai laissé unity s'en charger, mais un IK bien défini correspond aussi à quelque chose qui me plairait. (voir photo ci-après)
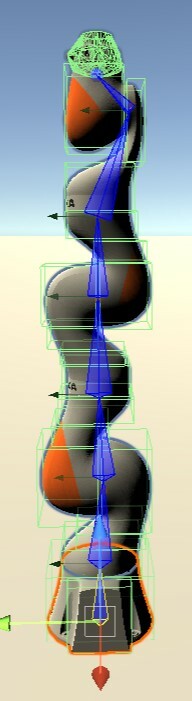
En ce qui concerne la vélocité angulaire, où puis-je régler ça? De ce que j'ai vu je ne peux que la définir en tant que cible dans le configurable joint. Merci du temps que vous m'accordez et désolé si je n'apporte pas les précisions suffisantes.
https://www.youtube.com/watch?v=myuJpwBr45M
Je me dis que mon armature n'est sans doute pas adaptée, j'ai laissé unity s'en charger, mais un IK bien défini correspond aussi à quelque chose qui me plairait. (voir photo ci-après)
En ce qui concerne la vélocité angulaire, où puis-je régler ça? De ce que j'ai vu je ne peux que la définir en tant que cible dans le configurable joint. Merci du temps que vous m'accordez et désolé si je n'apporte pas les précisions suffisantes.

Re: Animation Bras Robotique
Bonjour,
tu peux verrouiller chaque body pour le figer dans sa position du moment en passant par les Constraints par exemple ( rigidbody.constraints = RigidbodyConstraints.FreezeAll;) et en les déverrouillant pour assurer de nouveau les mouvements. Un freezeRotation seul devrait marcher je pense aussi.

Pas d'aide par MP, le forum est là pour ça.
En cas de doute sur les bonnes pratiques à adopter sur le forum, consulter la Charte et sa FAQ
Re: Animation Bras Robotique
Merci beaucoup Max, ça marche nickel maintenant.
Re: [Résolu] Animation Bras Robotique
Salut à tous, je souhaite intervenir dans votre échange car j'ai remarqué que vous travaillez sur l'animation du bras KUKA avec Unity pour un projet en réalité virtuelle. J'ai un projet similaire, mais je l'aborde avec le META QUEST Pro. Pourriez vous partager la méthode que vous utilisez ? 
-
boubouk50
- ModoGenereux
- Messages : 6246
- Inscription : 28 Avr 2014 11:57
- Localisation : Saint-Didier-en-Bresse (71)
Re: Animation Bras Robotique
Essaie d'envoyer un MP à Vevitek.
Tu peux aussi le taguer en le citant (ce que je viens de faire). Il recevra une notification.
Sa dernière visite datant du 15 mai 2021, je crains qu'il ne se connecte plus depuis que son projet est terminé...
De ce que je lis, il faudrait passer par des rigidbodys et des configurable Joints avec des contraintes d'axe pour réaliser le setup. Le mesh semble avoir un skin mesh renderer avec des bones, mais ce n'est pas nécessaire, je pense, puisque les pièces ne sont pas déformables. Par contre, il faudra bien gérer les pivots de chaque élément.
"Ce n'est pas en améliorant la bougie, que l'on a inventé l'ampoule, c'est en marchant longtemps."
Nétiquette du forum
Savoir faire une recherche
Apprendre la programmation
Nétiquette du forum
Savoir faire une recherche
Apprendre la programmation